压强(压强控制模式) 流量(流量调节模式)
压强控制(压强):这个工作模式用于由可变流量(上游控制)或可变通导(下游控制)控制真空系统中的压强。
这个模式需要任何一种提供的测量规管(→64)或其它适当的传感器和控制阀。
压强传感器将一个连续的压强讯号(0-10伏直流)送至VCC500。VCC500将压强讯号(工作值)与标定压强比较,并操纵控制阀补偿被控制过程的动态特性。这就是说,
工作值应尽快达到设点(标定值)而摆动尽可能x小。设点(标定值)可在压强控制器上手动输入或由外控制系统馈入。
控制模式 VCC500可工作于两种控制模式:
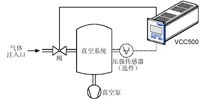
SID: 采用可变流量(上游控制)控制压强:
控制阀调节真空系统的气体注入。当真空系统中的压强上升时阀门盖板往关闭方向运动。
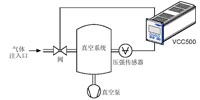
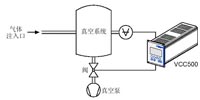
INV: 采用可变通导(下游控制)控制压强:控制阀调节真空系统的气体通量。当真空系统中的压强上升时阀门盖板往开启方向运动。
控制类型 两种控制类型: 自动: 自动是PI(正比/积分)控制类型控制速度1...99(1 = 慢,99 = 快)。这种控制类型用于过程的快速最佳化。
PID: PID控制类型的增益(Kp),复位时间(Tn),和导出时间(Tv)可由用户定义。这种控制类型用于同时要求设点的良好控制与快速响应。
流量调节(流量) 这个工作模式用于真空系统中的流量调节(上游控制)。
这个模式要求VDE016或DM005控制阀。